
ベルーガさんにお渡ししたYPVS12Fの回路図とソースコードを展開しておきます。
自分のものとの違いは、YPVSのテーブルを10ずつ小さくしているのと、ノイズリダクションを試しに入れています。
テーブル調整のお陰でオイルポンプやバルブの調整しなくて済みました。
SDRもエイプも、そしてPIC12Fも、小さくてパワフルなものが大好きなのです。
自分は信号待ちセッティングしたいけど、だれでも作れる物がやっぱり良いですよね。
取り付けの際の注意事項としては、
PICがよーわからんけど、もっとよく知りたい人は

8ピンPICマイコンの使い方がよくわかる本 (基礎入門) [単行本(ソフトカバー)]
がまずは超お勧め。
プログラムはHITEC-Cが買収される前の旧式の書き方ですんで注意が必要。
#define _LEGACY_HEADERS
とプログラムの先頭に書けば、最新のMPLABでも、この本に記載のソースコードが使える。
【2017/08/27】上記の本は古くて苦労すると思うので今はこちらが良いと思います。
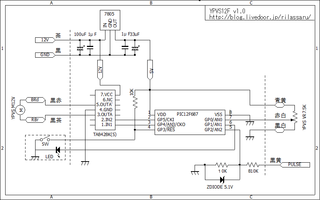
回路図
このプログラムはバルブ開度のテーブルを二つ持っている。
スイッチはバルブ開度のテーブル変更に使う。
別に不要でオープンのままだとテーブル2が使われる。
テーブル1はノーマル風、テーブル2はアグレッシブ版。
以下ソース。
GPLv2で配布です。修正BSDライセンスで配布です。つまり何でもご自由にって事で。
[コードを表示する]
自分のものとの違いは、YPVSのテーブルを10ずつ小さくしているのと、ノイズリダクションを試しに入れています。
テーブル調整のお陰でオイルポンプやバルブの調整しなくて済みました。
SDRもエイプも、そしてPIC12Fも、小さくてパワフルなものが大好きなのです。
自分は信号待ちセッティングしたいけど、だれでも作れる物がやっぱり良いですよね。
取り付けの際の注意事項としては、
- 組立て後の各種通電チェックは必ず行う
- 動作し始めてからは暫く熱を持っていないかチェック
- YPVSの全開、全閉の角度が広がっているので、オイルポンプ、バルブのワイヤーをチェック
特にオイルポンプの調整はアイドリングさせてポンプが動作している事を必ず見る
キーオンでYPVSが全開になるまで待ってバルブのワイヤー調整をする
オイルポンプのセッティングが変わりますので、下手をすれば焼きつきます。
PICがよーわからんけど、もっとよく知りたい人は
8ピンPICマイコンの使い方がよくわかる本 (基礎入門) [単行本(ソフトカバー)]
がまずは超お勧め。
プログラムはHITEC-Cが買収される前の旧式の書き方ですんで注意が必要。
#define _LEGACY_HEADERS
とプログラムの先頭に書けば、最新のMPLABでも、この本に記載のソースコードが使える。
【2017/08/27】上記の本は古くて苦労すると思うので今はこちらが良いと思います。

回路図

このプログラムはバルブ開度のテーブルを二つ持っている。
スイッチはバルブ開度のテーブル変更に使う。
別に不要でオープンのままだとテーブル2が使われる。
テーブル1はノーマル風、テーブル2はアグレッシブ版。
以下ソース。
[コードを表示する]
/** -----------------------------------------------------------------
YPVS12F
build: 2012/12/23 version 1.0
2012/12/28 version 1.1 NR追加
author: Rilassaru
------------------------------------------------------------------ */
#include
#include
#define _XTAL_FREQ 8000000 // 8MHz
#define LED GP1
#define MC1 GP4
#define MC2 GP5
#define MODE GP3
#define TRUE 1
#define FALSE 0
#define TIMEOUT_COUNT 7 // この回数タイムアウトしたらエンジン停止
#define INSENSITIVE_RANGE 6 // 不感症領域
#define WIDE_RANGE_RATIO 3 // 特別な不感症領域の倍率
#define BRAKE_TIME 120 // ブレーキを掛ける時間(x 22us)
#define DRIVE_TIME 1 // 立ち上がりの最小時間(x 22us)
#define MT_STOP_TIME 90 // TA8428Kは切り替えにSTOP時間100us必要
#define NR_DATA_NUM 10 // NoiseReduction用データ配列数(3以上必要)
#define NR_TRIGGER 80 // 電気的ノイズと判断する領域(実測で決める)
#define FULL_CLOSE_TARGET(x) (gPotTable[x][0])
#define FULL_OPEN_TARGET(x) (gPotTable[x][10])
__CONFIG(
FOSC_INTOSCIO & // 発振機 内臓利用
WDTE_OFF & // ウォッチドッグ 無効
PWRTE_ON & // パワーアップタイマー 有効
BOREN_ON & // ブラウンアウト検出 有効
MCLRE_OFF & // ~MCLR 無効
CP_OFF & // コードプロテクション 無効
IESO_OFF & // IEスイッチオーバー 無効
FCMEN_OFF // フェイルセーフクロック 無効
);
// ポテンションメータテーブル
const unsigned int gPotTable[2][11] = {
//0 1 2 3 4 5 6 7 8 9 10(Krpm)
//-- 2013/02/24
180, 180, 180, 180, 180, 190, 274, 347, 436, 490, 490,
160, 160, 160, 160, 160, 170, 220, 330, 490, 490, 490
//-- 2013/01/02
//190, 190, 190, 190, 190, 190, 274, 357, 446, 500, 500,
//170, 170, 170, 170, 170, 180, 230, 340, 500, 500, 500
//-- 2012/12/23
//190, 190, 190, 190, 190, 190, 274, 357, 446, 500, 500,
//170, 170, 170, 170, 170, 180, 270, 360, 500, 500, 500
};
// Engine state
typedef enum{
EG_STARTED, // EG_STARTED
EG_INIT_OPEN1, // 電源オン時の最初の全開動作
EG_INIT_CLOSE, // その次の全閉
EG_INIT_OPEN2, // その次の全開
EG_INITIALIZED, // 全開のままエンジン起動待ち
}EG_STATE;
// Moter state
/*
IN1 IN2 OUTA OUTB
H H L L BRAKE
L H L H 逆転
H L H L 正転
L L OFF (ハイインピーダンス) ストップ
*/
typedef enum{
MT_BRAKE,
MT_OPEN,
MT_CLOSE,
MT_STOP
}MT_STATE;
MT_STATE mt_state[3] = {MT_STOP};
#define MTBrake() {MC1=1;MC2=1;}
#define MTOpen() {MC1=0;MC2=1;}
#define MTClose() {MC1=1;MC2=0;}
#define MTStop() {MC1=0;MC2=0;}
EG_STATE gEGState = EG_STARTED;
unsigned int gRPM = 0;
unsigned int gPot = 0;
int MoterHead(unsigned int pot, unsigned int rpm, unsigned char mode);
unsigned int PotNoiseReduction(unsigned int pot);
/** -----------------------------------------------------------------
1|VDD PIC12F687 VSS|8
OPEN <- 2|GP5(MC2) GP0/AN0|7 <-Potension meter Analog IN
CLOSE<- 3|GP4(MC1) GP1/AN1|6 ->LED
MODE -> 4|GP3/~MCLR GP2/AN2/CCP1|5 <-PULSE
------------------------------------------------------------------ */
/** -----------------------------------------------------------------
void main(void)
メイン関数
------------------------------------------------------------------ */
void main(void)
{
OPTION_REG = 0b10000010; // PUしない
WPU = 0b00000000; // PUしない
OSCCON = 0b01110000; // 8MHz
TRISIO = 0b00001101; // IN: GP0/GP2/GP3/ OUT:GP1/GP4/GP5
ANSEL = 0b01010001; // AN0選択、Tad(Fosc/16)=2.0us
CMCON0 = 0x7; // コンパレータ無効
ADCON0 = 0b10000001; // 右詰、VDD、AN0利用
int ii;
gEGState = EG_INIT_OPEN1;
MTStop(); // モータ初期値
// スタートアップデモ
for( ii = 0; ii < 10; ii++ ) {
__delay_ms(100);
LED = !LED;
}
LED = 0;
// Input capture初期化(*1)
CCP1CON = 0; // 一度リセットする必要がある
CCP1CON = 0b00000110; // every 4th rising edge
CCP1IF = 0; // 設定後は必ずIFをリセット
// タイマー初期化
T1CON = 0b00110100; // T1CKPS 1:8
TMR1IF = 0;
TMR1L = 0;
TMR1H = 0;
// 割り込み初期化
GIE = 1;
PEIE = 1;
TMR1IE = 1; // Timer1 intterupt on
TMR1ON = 1; // Timer1 start
CCP1IE = 1; // Capture interrupt on
// NR配列の初期化
for(ii = 0; ii < NR_DATA_NUM; ii++) {
GO_DONE = 1;
while(GO_DONE);
gPot = PotNoiseReduction((ADRESH * 256 + ADRESL)+1); // Analog input
}
// メインループ
while(1) {
LED = MODE; // モード表示
GO_DONE = 1; // 変換開始
while(GO_DONE); // 変換待ち Tad*11=22us
gPot = PotNoiseReduction((ADRESH * 256 + ADRESL)+1); // Analog input
if(MoterHead(gPot, gRPM, MODE)) {
__delay_us(MT_STOP_TIME);
}
}
}
/** -----------------------------------------------------------------
unsigned int PotNoiseReduction(unsigned int pot)
ポテンションメータのノイズ除去
@param pot ポテンションメータ(1〜1,024)
@return ノイズ除去後のポテンションデータ
------------------------------------------------------------------ */
unsigned int PotNoiseReduction(unsigned int pot)
{
static unsigned int pots[NR_DATA_NUM] = {0};
unsigned int ave;
int ii;
ave = pots[NR_DATA_NUM-1];
for(ii = (NR_DATA_NUM-1); ii > 0; ii--) {
pots[ii] = pots[ii-1];
ave += pots[ii];
}
ave /= NR_DATA_NUM;
pots[0] = pot;
// ノイズ判定
if((pot > ave+NR_TRIGGER) || (ave-NR_TRIGGER > pot)) {
return ave;
}
return pot;
}
/** -----------------------------------------------------------------
void MoterHead(unsigned int pot, unsigned int rpm)
モータ制御
@param pot ポテンションメータ(1〜1,024)
@param rpm 回転数(0〜9,999)
@oaram mode 0 or 1
@return 100usの待ち時間が必要な場合 0以外
------------------------------------------------------------------ */
int MoterHead(unsigned int pot, unsigned int rpm, unsigned char mode)
{
unsigned int target;
static char brake_count = 0;
static char open_count = 0;
static char close_count = 0;
int iRange = INSENSITIVE_RANGE;
// パルスが入っているならどこからでもEG_STARTED
if(rpm > 100) {
gEGState = EG_STARTED;
}
// --------------------------------------------------------------
// モード別のターゲット設定とモード遷移
// --------------------------------------------------------------
switch(gEGState) {
case EG_STARTED: {
unsigned int index;
// アイドリング状態の時は過敏に反応しない
if(rpm < 2000) {
iRange = INSENSITIVE_RANGE * WIDE_RANGE_RATIO;
}
// 1万回転以上は使わない
if(rpm > 10000) {
rpm = 9999;
}
// ターゲット算出 (*2)
index = rpm / 1000;
if(gPotTable[mode][index+1] >= gPotTable[mode][index]) {
target = gPotTable[mode][index]
+ ((((gPotTable[mode][index+1] - gPotTable[mode][index]) * ((rpm%1000)/100)))/10);
} else {
target = gPotTable[mode][index]
- ((((gPotTable[mode][index] - gPotTable[mode][index+1]) * ((rpm%1000)/100)))/10);
}
break;
}
// 電源オン時の最初の全開動作
case EG_INIT_OPEN1: {
target = FULL_OPEN_TARGET(mode);
if(pot >= FULL_OPEN_TARGET(mode) - (INSENSITIVE_RANGE * WIDE_RANGE_RATIO)) {
gEGState = EG_INIT_CLOSE;
}
break;
}
// その次の全閉
case EG_INIT_CLOSE: {
target = FULL_CLOSE_TARGET(mode);
if(pot <= FULL_CLOSE_TARGET(mode) + INSENSITIVE_RANGE) {
gEGState = EG_INIT_OPEN2;
}
break;
}
// その次の全開
case EG_INIT_OPEN2: {
target = FULL_OPEN_TARGET(mode);
if( pot >= FULL_OPEN_TARGET(mode) - INSENSITIVE_RANGE) {
gEGState = EG_INITIALIZED;
}
break;
}
// 全開のままエンジン起動待ち
case EG_INITIALIZED: {
target = FULL_OPEN_TARGET(mode);
iRange = INSENSITIVE_RANGE * WIDE_RANGE_RATIO;
break;
}
default:
break;
}
// --------------------------------------------------------------
// ポテンションメータと比較して制御
// --------------------------------------------------------------
if((MT_OPEN == mt_state[0] && MT_OPEN == mt_state[1] && MT_OPEN == mt_state[2]) ||
(MT_CLOSE == mt_state[0] && MT_CLOSE == mt_state[1] && MT_CLOSE == mt_state[2])) {
iRange /= 2;
}
if(target > (pot+iRange)) {
mt_state[0] = MT_OPEN;
} else if(target < (pot-iRange)) {
mt_state[0] = MT_CLOSE;
} else {
mt_state[0] = MT_STOP;
}
// --------------------------------------------------------------
// BRAKE制御
// --------------------------------------------------------------
if(MT_STOP == mt_state[0] && MT_STOP == mt_state[1]
&& (MT_OPEN == mt_state[2] || MT_CLOSE == mt_state[2])) {
brake_count = BRAKE_TIME;
} else if(MT_OPEN == mt_state[0] && MT_STOP == mt_state[1]) {
open_count = DRIVE_TIME;
} else if(MT_CLOSE == mt_state[0] && MT_STOP == mt_state[1]) {
close_count = DRIVE_TIME;
}
if(open_count > 0) {
open_count--;
mt_state[0] = MT_OPEN;
} else if(close_count > 0) {
close_count--;
mt_state[0] = MT_CLOSE;
} else if(brake_count > 0) {
brake_count--;
mt_state[0] = MT_BRAKE;
}
// --------------------------------------------------------------
// モータ出力
switch(mt_state[0]) {
case MT_BRAKE: MTBrake(); break;
case MT_OPEN: MTOpen(); break;
case MT_CLOSE: MTClose(); break;
case MT_STOP: MTStop(); break;
default: MTStop(); break;
}
mt_state[2] = mt_state[1];
mt_state[1] = mt_state[0];
if(mt_state[0] == MT_STOP && mt_state[1] != MT_STOP) {
return 1;
}
return 0;
}
/** -----------------------------------------------------------------
void interrupt ISR(void)
割り込み制御関数
Timer1、Captureを処理する
------------------------------------------------------------------ */
void interrupt ISR(void)
{
static int timeout_count = 0;
// Input capture
if(CCP1IF) {
// タイマーリセット
TMR1H=0;
TMR1L=0;
// (*1)
gRPM = 60000000UL/(unsigned long)((CCPR1H*256)+CCPR1L);
CCP1IF = 0;
}
// Timer1 タイムアウト→エンジン停止と判断
if(TMR1IF) {
gRPM = 0;
if(TIMEOUT_COUNT < timeout_count++) {
if(EG_STARTED == gEGState) {
gEGState = EG_INIT_OPEN1;
}
timeout_count = 0;
}
TMR1IF = 0;
}
}
/** -------------------------------------------------------------
// *1 Input capture 補足
-----------------------------------------------------------------
動作8Mhz、Fosc/4 でTimer最小値は (1/8000000)*4 = 0.0005(ms)
プリスケーラを1:8 とすると 0.0005(ms)*8 = 0.004(ms) ←分解能
最大値は 0.004(ms)*65535 = 262.14(ms)
1000rpm は60(ms)、10000rpm は6(ms)間隔のパルス
4回Edgeでカウントするとそれぞれ240(ms)/24(ms)
Capture割り込み時の回転数は
count/0.004(ms)*60000(ms)
色々省略して
60,000,000/count で回転数が出る。
-------------------------------------------------------------- */
/** -------------------------------------------------------------
// *2 Target 計算 補足
-----------------------------------------------------------------
Targetを算出
(d) ... Table間の差分を100分する;
d = (gPotTable[index+1] - gPotTable[index])
(x) ... 1000桁以上を無くして100で割る
x = ((rpm%1000)/1000);
(y) ... 目標値
= dx + b
target
| /|dy
|_/_|
| dx
+-+-+-+-+-+-...>rpm
0 1 2 3 4 5...
-------------------------------------------------------------- */


コメント
コメント一覧 (9)
プログラミングできると世の中すべて楽しくなりそうです。。。
いつかはiPhoneでCDIのタイミングやいろんなコトできたらいいなぁと妄想していました(笑)
挫折した経験からよくわかるのですが、こんなに貴重なプログラムを公開していただいて、ありがたいことです。
・・・だけど、僕のSDR、空冷化してYPVSを外しちゃったんだよな・・・(爆)
iPhoneよりはAndroidの方がとても簡単す。
本も良いのが出てるです。
このプログラムは短い癖にこり過ぎてて最早参考にならないと思います。
もっとシンプルで簡単に出来れば良いのですが、そこはセンスですからね〜(汗
エアプランツさんの空冷化初号機と聞いてます。
幕張で一度見ましたけど、音がいいっすね〜。
YPVSが無いのは残念w
今読み返すと自分自身でよく分からんようになってますw
うん、やっぱりオタフク
でも、カゴメウスターをカレーにかけるのがも〜っと好きです
僕のSDRは3号機です〜
Androidか・・とりあえず立ち読みしてみよう。
PICに書き込めばセッティング変更可能って事でしょうか?
オモシロソウっすね(^O^)
そう、そのとおりです。
本当に単純なフィードバック回路なんです。