

ここではOSR-CDIとホスト機器の接続に使われる通信仕様について記載しています。
Versionは1.5.0ですが、それ以前のVersionも通信プロトコル部分はほぼ同じです。
1.HID接続情報
2.パケットのフォーマット
3.OSR-CDIとやり取りするデータ
_3-1.点火時期情報
_3-2.PV制御情報
_3-3.設定値情報
_3-4.リアルタイム情報
4.各コマンド詳細
_4-1.CMD_GET_DATA(0x90)
_ 4-1-1.送信パケットフォーマット
_ 4-1-2.受信パケットフォーマット
_4-2.CMD_SET_DATA(0x92)
_ 4-2-1.送信パケットフォーマット
_ 4-2-2.受信パケットフォーマット
_ 4-2-3.点火時期情報
_ 4-2-4.PV制御情報
_ 4-2-5.設定値情報
_4-3.CMD_GET_STATUS(0x93)
_ 4-3-1.送信パケットフォーマット
_ 4-3-2.受信パケットフォーマット
5.Appendix
_5-1.点火時期の計算方法
_5-2.マップ情報とページ番号
1.HID接続情報
OSR-CDIはUSB2.0のHID(Human Interface Device)として認識されます。このため、WindowsやAndroid端末では、特にドライバー等必要なく認識され、アプリ側とHIDプロトコルで通信が可能となっています。
詳細は、OSR-CDIのファームウェアソースコードの内usbinterface.c、Windows側ソフトWinCDIの内HidDvice.cppを参照してください。
HID接続に必要な情報は以下の通りです。
| ID | Value |
|---|---|
| Vendor ID | 0x04D8 |
| Product ID | 0x003C |
| USB Spec Number | 0x0200 |
| Class Code | 0x00 |
| Subclass code | 0x00 |
ホスト側はVendrIDとProductIDによってOSR-CDIデバイスを特定します。
Classコードは00です。
これらはMicrochip社のUSBコードサンプルの値です。
接続に成功した後は、コマンドを投げる、返答を得る形でOSR-CDIとの通信を行います。
OSR-CDIからホスト側に能動的にデータを送ってくる事はありません。
NOTE:基本的にエンジン始動中にUSBからFlashメモリの読み書きを行うと、USB接続が失敗する事がありますので注意が必要です。これはUSBの動作よりも点火動作を優先する為です。
マップ書き込み中によからぬタイミングで点火動作を行うこともある可能性もあります。
2.パケットのフォーマット
OSR-CDIとのやり取りは送信受信を含めて全て64バイトの固定長です。必ず64バイトを送信し、64バイトを受信しなければなりません。
64バイトの中でOSR-CDIは頭の4バイトをヘッダー情報、残り60バイトをデータ情報として扱っています。
パケット内容の詳細は、コマンド毎の詳細を参照してください。
3.OSR-CDIとやり取りするデータ
OSR-CDIは、点火時期やPV(排気デバイス)のマッピング情報、設定値情報を入出力できます。それに加え、リアルタイム情報の取得が出来ます。
| 項目 | 詳細 |
|---|---|
| 点火時期情報 | 0〜1590rpmまで100rpm刻みの情報。合計160点x4、320バイトx4 |
| PV制御情報 | 0〜1590rpmまで100rpm刻みの情報。合計160点x4、160バイトx4 |
| 設定値情報 | 動作に必要な各種設定値。 |
| リアルタイム情報 | OSR-CDIの各種リアルタイム情報。合計1点、64バイト |
これらのデータはPIC16F145xのフラッシュメモリ上のProgram Memory領域にアドレス固定で格納されています。
USBを通してのやり取りをする際、データの指定はアドレスで指定するのではなく、論理的なページ番号で指定する仕様としています。
3-1.点火時期情報
OSR-CDIはTPS(スロットルポジションセンサー)の入力によって、4枚のマップを切り替える事ができます。1枚のマップには0rpmから15900rpmまで100rpm刻みでデータを投入する事が出来ます。
OSR-CDIのマイコン内部での計算量を削減する為に、あらかじめホスト側で点火時期の遅延量をマイコンで即時利用できるよう変換し、マイコンのFlashメモリ上に書き込みます。
取り出す場合もホスト側で変換が必要となります。
変換方法はAppendixにします。
3-2.PV制御情報
PVとはPower Valveの略で、排気デバイスの事を指します。OSR-CDIが対応する排気デバイスは可変抵抗を具備している想定です。
ヤマハのYPVS、スズキのAETC等は可変抵抗によって排気デバイスの開度を調整しています。
OSR-CDIは、この可変抵抗に5Vを印加し、可変抵抗によって分圧された電圧から、排気デバイスの現在の開度を認識します。
0V〜5Vまでを、マイコンのADC(アナログデジタルコンバータ)によって0〜255までに変換し、モーターを動作させるフィードバック制御を行っています。
マップデータには、このADC変換された値をそのまま利用します。
NOTE:実測でスズキのAETCは90で全閉、170で全開、ヤマハのYPVSは55で全閉、123で全開でした。個体差や、ワイヤーの張り具合で値は変わりますが、純正のコントローラは固定値なので、一旦この値で設定し、設定後は排気デバイスの位置が確実にマニュアル通りになっているかを確認する必要があります。
3-3.設定値情報
OSR-CDIは多様な車種に対応する為、動作に必要な設定値を必要とします。容量は2ページ64バイト分を確保していますが、現時点では1ページのみ使っています。
3-4.リアルタイム情報
OSR-CDIが認識している各種情報を取り出すことができます。詳細はGET_STATUSコマンドの章を参照してください。
4.各コマンド詳細
OSR-CDIに64バイトのコマンドパケットを投げる事によって、64バイトのレスポンスパケットが返却されます。Version1.5系からマップ数が2chから4chに増加し、マイコン内部のメモリマップが変更になったので、コマンドはOSR-CDIのVersion1.5系では0x90〜、それ以前のVersion1.4や1.3は0x80〜を使っています。
以下はVersion1.5系について記載しています。
4-1.CMD_GET_DATA(0x90)
OSR-CDIから、点火時期、PV制御のマッピング情報、設定値情報を取り出します。Flashメモリを読み書きしますので、エンジン始動中にこのコマンドを投げないでください。
読み書きに失敗しUSB接続が中断する可能性があります。
OSR-CDI Ver1.4以前はコマンド番号は0x80でした。
4-1-1.送信パケットフォーマット
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 0x90 | GET_DATAコマンド |
| 1 | ページ番号 | 点火時期やPV制御のデータが入ったページ番号 |
| 2~63 | 未定義 |
4-1-2.受信パケットフォーマット
64バイトのパケット中に4バイトのヘッダ情報に続いて、60バイトの情報が格納されています。CMD_GET_DATAコマンドを送信後、OSR-CDIから返却される情報は以下の通りです。
(CMD_SET_DATAコマンドでの返却されるものも、全く同じ内容になります)
- 点火時期情報
- PV制御情報
- 設定値情報
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 成功:0x00 失敗:0以外 | 0x00が入っている場合は以下のデータが正しく入って返却されている |
| 1 | 0x00-0xFF | 読み出し先頭アドレスの上位バイト(デバッグ用です) |
| 2 | 0x00-0xFF | 読み出し先頭アドレスの下位バイト(デバッグ用です) |
| 3 | 未定義 | |
| 4 | data01 | 読み出しデータの1バイト目 |
| 〜 | 〜 | 〜 |
| 63 | data64 | 読み出しデータの64バイト目 |
読み出しデータは16ビット幅のものは、2バイトに渡りLoバイト、Hiバイトの順番で入ります。(リトルエンディアン方式)
例えば16ビット値のデータ0x00FF、0xFF00の4バイトを送受信する場合、データの並びは以下の様になります。
1:0xFF
2:0x00
3:0x00
4:0xFF
4-1-3.点火時期情報
以下は16ビット幅の点火時期上オフを読みだした場合のデータ配置です。一度に16個のデータが得られます。
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 成功:0x00 失敗:0以外 | 0x00が入っている場合は以下のデータが正しく入って返却されている |
| 1 | 0x00-0xFF | 読み出し先頭アドレスの上位バイト(デバッグ用です) |
| 2 | 0x00-0xFF | 読み出し先頭アドレスの下位バイト(デバッグ用です) |
| 3 | 未定義 | |
| 4 | data01-L | 1番目の読み出しデータのLoバイト |
| 5 | data01-H | 1番目の読み出しデータのHiバイト |
| 6 | data02-L | 2番目の読み出しデータのLoバイト |
| 7 | data03-H | 2番目の読み出しデータのHiバイト |
| 〜 | ||
| 36 | data16-L | 16番目の読み出しデータのLoバイト |
| 37 | data16-H | 16番目の読み出しデータのHiバイト |
| 38〜64 | 未定義 |
4-1-4.PV制御情報
以下は8ビット幅のPV制御情報を読みだした場合のデータ配置です。1度に32個の情報が得られます。
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 成功:0x00 失敗:0以外 | 0x00が入っている場合は以下のデータが正しく入って返却されている |
| 1 | 0x00-0xFF | 読み出し先頭アドレスの上位バイト(デバッグ用です) |
| 2 | 0x00-0xFF | 読み出し先頭アドレスの下位バイト(デバッグ用です) |
| 3 | 未定義 | |
| 4 | data01 | 1番目の読み出しデータ |
| 〜 | ||
| 36 | data32 | 32番目の読み出しデータ |
| 37〜64 | 未定義 |
4-1-5.設定値情報
以下は設定値情報を読みだした場合のデータ配列です。| 番号 | 値 | 説明 | デフォルト値 |
|---|---|---|---|
| 0 | 成功:0x00 失敗:0以外 | 0x00が入っている場合は以下のデータが正しく入って返却されている | |
| 1 | 0x00-0xFF | 読み出し先頭アドレスの上位バイト(デバッグ用です) | |
| 2 | 0x00-0xFF | 読み出し先頭アドレスの下位バイト(デバッグ用です) | |
| 3 | 未定義 | ||
| 4 | 0x00-0xFF | OSR-CDIファームウェアのメジャーバージョン 例えばVersionが1.5.3の場合は1 | 1 |
| 5 | 0x00-0xFF | OSR-CDIファームウェアのマイナーバージョン 例えばVersionが1.5.3の場合は53 | 50 |
| 6 | 0-159 | QSが有効となる回転数 OSR-CDIはサポートする回転数が15900rpmなので、159が上限値。 | 150 |
| 7 | 0x00-0xFF | QSスイッチが入ってからカットに至るまでの時間(クランク回転数) | 0 |
| 8 | 0x00-0xFF | QSで点火カットを行う時間(クランク回転数) | 24 |
| 9 | 0x00-0xFF | QSで点火カット後のスイッチ無効時間(クランク回転数) | 180 |
| 10 | 0:QSとして動作 1:KSとして動作 | QSスイッチをKS(キルスイッチ)に代替するか否かを指定する | 0 |
| 11 | 0:導通でオン 1:開放でオン | QSスイッチが導通でオンなのか、開放でオンなのかを指定する | 0 |
| 12 | 0-159 | レブリミット回転数 | 120 |
| 13 | 0x00-0xFF | 予約領域(未定義) | 0 |
| 14-15 | 0x00-0xFFFF | エンジン回転数を割り出す為の固定値 クランク1回転に付きピックアップ信号が2回来る車種(RZやTZR等)は18,750 同、1回来る車種(DTやSDR等)は37,500 | 18750 |
| 16 | 0x00-0xFF | クランク1回転に付きピックアップ信号が2回来る車種(RZやTZR等)は2 同、1回来る車種(DTやSDR等)は1 | 2 |
| 17 | 0x00-0xFF | ピックアップ位置(Degree) RZ250は33、TZR250やRZRは36、SDRは72、DTは69等 | 36 |
| 18 | 0x00-0xFF | エンジン始動時にアナログ点火を行う回数 | 10 |
| 19〜31 | 予約領域 |
4-2.CMD_SET_DATA(0x92)
OSR-CDIへ、点火時期情報やPV制御情報のマッピング情報を投入します。Flashメモリを読み書きしますので、エンジン始動中にこのコマンドをなるべく投げないでください。
エンジン始動中かどうかは、リアルタイム情報を読み込むことによって判定できます。
読み書きに失敗する可能性があります。またよからぬタイミングで点火してしまう可能性があります。
OSR-CDI Ver1.4以前はコマンド番号は0x82でした。
4-2-1.送信パケットフォーマット
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 0x92 | SET_DATAコマンド |
| 1 | ページ番号 | 点火時期やPV制御値の番号 |
| 2 | 未定義 | |
| 3 | 未定義 | |
| 4~63 | data | 書き込みデータ 内容は送信するデータにより変わります。 |
点火時期情報、PV制御情報、設定値情報のデータは5バイト目から投入します。
5バイト目以降の各種データの配置は、GET_CMD_DATAで返却されるものと同じですので、詳細はそちらを参照ください。
4-2-2.受信パケットフォーマット
CMD_SET_DATAコマンドを送信後、OSR-CDIから返却される情報は、書き込みを行った情報と同じものが返却されます。5バイト目以降を比較する事によって送信したデータと実際にFlashメモリに書き込まれた情報が一致するかを確認する事が出来ます。
(Flashメモリ書き込み後、OSR-CDIはGET_DATAと同じ処理をしていますので、内容も同じになります)
例えば、点火時期データを送信すると、書き込みされた点火時期データが以下の様に返却されます。
フォーマットはGET_DATAと同じです。
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 成功:0x00 失敗:0以外 | 0x00が入っている場合は以下のデータが正しく入って返却されている |
| 1 | 0x00-0xFF | 書き込み先頭アドレスの上位バイト(デバッグ用です) |
| 2 | 0x00-0xFF | 書き込み先頭アドレスの下位バイト(デバッグ用です) |
| 3 | 未定義 | |
| 4 | data01-L | 1番目の書き込みデータのLoバイト |
| 5 | data01-H | 1番目の書き込みデータのHiバイト |
| 6 | data02-L | 2番目の書き込みデータのLoバイト |
| 7 | data03-H | 2番目の書き込みデータのHiバイト |
| 〜 | ||
| 36 | data16-L | 16番目の書き込みデータのLoバイト |
| 37 | data16-H | 16番目の書き込みデータのHiバイト |
| 38〜64 | 未定義 |
OSR-CDIはSET_DATAによって送られてきたデータをFlashメモリに書き込んだ後、Flashメモリから読みだした内容を送り返してきます。
このため送信したデータ、受信したデータを比較すれば、正しくマイコンに書き込まれたかを確認する事が出来ます。
4-3.CMD_GET_STATUS(0x93)
OSR-CDIから、リアルタイム情報を取り出します。OSR-CDI Ver1.4以前はコマンド番号は0x83でした。
4-3-1.送信パケットフォーマット
| 番号 | 値 | 説明 |
|---|---|---|
| 0 | 0x93 | GET_STATUSコマンド |
| 1〜64 | 未定義 |
4-3-2.受信パケットフォーマット
1バイト目から全てデータが詰め込まれています。OSR-CDIのプロトコル上に、エラーコード等はありません。
| 番号 | 情報 | 内容 |
|---|---|---|
| 0 | エンジン回転数の下位バイト | エンジンの回転数(r.p.m.)を100で割った値 |
| 1 | エンジン回転数の上位バイト | 過去エンジン回転数を16ビットでやり取りしていた頃の名残で、現在は使われていない |
| 2 | 現在選択されているマップ | マップスイッチやTPSによって設定されているマップ番号で0〜3の値 |
| 3 | エンジン始動状態 | エンジン停止中の場合は0、動作中の場合は1 |
| 4 | PV現在値 | PVから読み取った位置情報で0〜255の値 |
| 5 | PV目標値 | マップから読み取ったPVの目標値 |
| 6 | PVモード | PVの制御モード。 0:PVがエンジン始動中に回転数に従い動作するモード 1:初期動作でPVを全開中。全開になるとモード2に移行する 2:初期動作でPVを全閉中。全閉になるとモード3に移行する 3:初期動作でPVを全開中。全開になるとエンジン始動まで待機する モード3にてエンジン始動を感知するとモード3から0に移行する モード0にてエンジン停止を感知するとモード0から1に移行する |
| 7 | PVモーター制御状態 | PVの制御状態 0:PVを開いている 1:PVを閉じている 2:PVを弱めに停止している(使われていません) 3:PVを強めに停止している |
| 8-9 | 点火時期設定値 | 現在の回転数で指定された点火時期マップの値 デバッグ用で、ホスト機器側でこの情報を取る事に大きな意味はありません |
| 10 | QS信号状態 | クイックシフター(QS)のオンオフスイッチの状態 QSスイッチの動作確認用に使えます QSスイッチが値が1から0になった時に、QSは動作を開始します |
| 12 | QS制御状態 | QSの制御状態(ステートマシン) 0:QSスイッチのオン待機状態(QS信号は1の状態) 1:QSスイッチが入った後の待機状態(QS信号が1から0になった際に遷移) 2:エンジンカット中 3:エンジンカット後のスイッチ無効状態 4:QSスイッチのオフ待機状態 QSの状態は0から順番に4まで遷移した後、0に戻ります 設定されたエンジン回転数がカウントアップした後、次の状態に遷移します |
| 13 | TPS情報 | TPSから読み取った位置情報で0〜255の値 |
| 14~63 | 未定義 |
5.Appendix
5-1.点火時期の計算方法
ホスト機器で設定した点火時期は、マイコン側での計算を省略する為にあらかじめホスト側で都合の良い形に変換してから設定しています。ピックアップ信号を感知してから、ある一定の時間が経過した後、点火信号を発生させる必要があります。これにPICマイコンのTimer2を利用しています。
PICマイコンのTimer2は8ビットタイマーですが、PrescalerとPostscalerによって実質16ビット長のタイマーとして利用できます。
Timer2の8ビット時代との互換性を担保する為、この様な仕様になっていますので、やや複雑です。

Timer2のPrescalerとPostscalerは以下の様に設定されます。
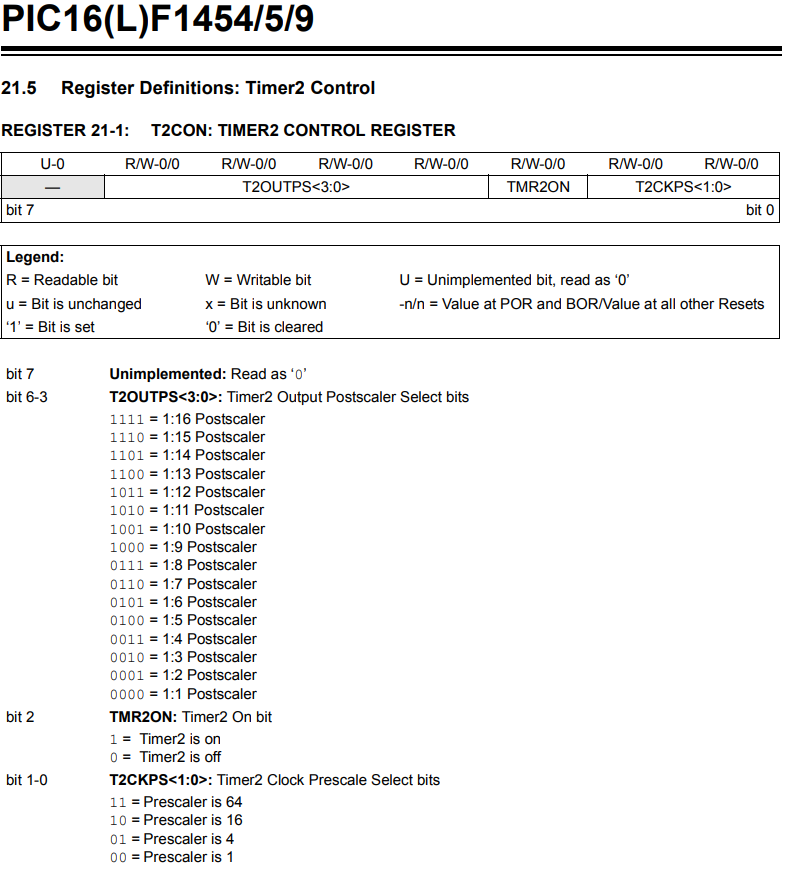
PICマイコンのTimer2の詳細はこちらを参照してください。
https://ww1.microchip.com/downloads/en/devicedoc/40001639b.pdf
この仕組みに合致させるために、マイコン内部で毎回計算をすると、計算時間が大きくなり、また大きな揺れが発生します。
その為、Timer2に合うようホスト側で事前に計算し、マイコン側で即時利用できる様に整えてから、マップ情報としてFlashメモリ上に書き込む手法を取っています。
計算方法に必要な要素は以下の通りです。
- マップ情報(BTDC何度で点火信号を送るのか)
- ピックアップ信号位置
- マイコン側での処理に必要なロス時間
コメントを追記しておきました。
実際に動作する詳細なコードはWincdiのHidDevice.cppを参照してください。
// ---------------------------------------------------------------------------
// deg2time
// ---------------------------------------------------------------------------
uint16_t HidDevice::deg2time( double deg, uint16_t rpm ) {
double pre_degree, pre_count;
uint16_t prescaler, pre, postscaler;
uint16_t pr2, t2con;
uint16_t result, ii;
if (0 == deg || 0 == rpm) {
return 0;
}
// 角度の精度を小数点1桁に揃える
deg *=10;
deg = (int)deg;
deg /= 10;
// ピックアップ角度から点火したい角度を引いて、遅延させる角度を出す
pre_degree = cfg.sys_pickup_degree - deg;
// 遅延させる角度から、マイコン側の必要なタイマー値を算出する
// 1000rpmでエンジンが回っている状態で、タイマーがカウントアップする数は
// count_of_1deg_at_1000rpm = 666.666667
// となる。
// このサンプルでは変数rpmに100分の1の値が入ってくる。例えば1000rpmの場合、
// 10が入っている。
// # 基準のカウント値を1000rpm(=10)にしているので、*10が入っている。
// # また精度を出すために掛け算を先に行い、割り算を最後に行っている。
pre_count = ((pre_degree * count_of_1deg_at_1000rpm * 10) / rpm);
// count_of_tuneはマイコンの動作時間で、1回転あたりのピックアップ信号が
// 1の時(DTやSDR)、610(step)
// 2の時(RZやTZR)、570(step)
// の値を実測から投入している。
if (pre_count > count_of_tune) {
pre_count -= count_of_tune;
} else {
pre_count = 0;
}
// 以上で、マイコン側で必要なカウント値が算出された。
// 次に、PIC16F145xのTimer2カウント値に変換する。
// Timer2 = Prescaler * PR2 * Postscaler
// PR2: {0 ... 255}
// Prescaler: {1:1/1:4/1:16/1:64}
// Postscaler: {1:1 ... 1:64}
// 最初に最もおおざっぱなprescaler値を計算する
ii = (uint16_t)(pre_count/256);
if ((ii/ 1) < 16) {prescaler = 1; pre = 0;}
else if((ii/ 4) < 16) {prescaler = 4; pre = 1;}
else if((ii/16) < 16) {prescaler = 16;pre = 2;}
else if((ii/64) < 16) {prescaler = 64;pre = 3;}
else {
// カウント値が長すぎてオーバーフローした場合0を返す。
return 0;
}
// 次にpostscalerを計算する
postscaler = (uint16_t)(pre_count/256/prescaler + 1);
// 最後にpr2を算出する
pr2 = (uint16_t)(pre_count / prescaler / postscaler);
// t2conはPIC16F145xnT2CONレジスタに入れる8ビット幅のデータ。
// +4はTMR2ONの3ビット目TMR2ONビットをセットする為に入れている。
t2con = ((postscaler-1) << 3) + 4 + pre;
// 上位をPrescalerとPostscalerで埋めて、下位をpr2で埋めて返却する
result = (t2con<<8) + pr2;
return result;
}基本的に逆の事を行っているだけです。
// ---------------------------------------------------------------------------
// time2deg
// ---------------------------------------------------------------------------
double HidDevice::time2deg( uint16_t src, uint16_t rpm ) {
uint8_t t2outps, t2ckps, pre, post, pr2;
uint32_t count;
double deg;
if (0 == src) {
return 0;
}
pr2 = src & 0xff; // 下位1バイトの取り出し
t2outps = src >> 11 & 15; // ポストスケーラーの取り出し
t2ckps = (src >> 8) & 3; // プリスケーラーの取り出し
post = t2outps + 1;
switch( t2ckps ) {
case 0: pre = 1; break;
case 1: pre = 4; break;
case 2: pre = 16; break;
case 3: pre = 64; break;
default: pre = 64; break;// Never in
}
deg = cfg.sys_pickup_degree - (((count*rpm) / 10) / count_of_1deg_at_1000rpm);
// 桁数揃え
deg *=10;
deg = (int)deg;
deg /= 10;
return deg;
}
5-2.マップ情報とページ番号
OSR-CDIとのやり取りはページ番号を指定する事によって行われます。通常マイコン側のアドレスを意識する必要はありません。
点火時期情報は1点につき16ビット長2バイトなので、1ページに16点情報が入っています。
PV情報は1点につき8ビット長1バイトなので、1ページに32点情報が入っています。
設定値情報は予約分も含め64バイトあり、32バイト毎に2ページに渡って情報が入っています。
実際、OSR-CDIからデータを読み込む時は、点火マップ情報、PVマップ情報、設定値情報を一気に読み込む、一気に書き込むことになります。
Version1.5系で各ページに入っている情報は以下の通りです。
(Version1.4以下とはデータの位置が異なります)
詳細はOSR-CDIファームウェアのconstant.hに記述がありますので、参考にしてください。
| page | map | Address | 備考 |
|---|---|---|---|
| 0 | IG01 | 1840-185F | 0~1500rpm |
| 1 | IG01 | 1860-187F | 1600~3100rpm |
| 2 | IG01 | 1880-189F | 3200~4700rpm |
| 3 | IG01 | 18A0-18BF | 4800~6300rpm |
| 4 | IG01 | 18C0-18DF | 6400~7900rpm |
| 5 | IG01 | 18E0-18FF | 8000~9500rpm |
| 6 | IG01 | 1900-191F | 9600~11100rpm |
| 7 | IG01 | 1920-193F | 11200~12700rpm |
| 8 | IG01 | 1940-195F | 12800~14300rpm |
| 9 | IG01 | 1960-197F | 14400~15900rpm |
| 10 | IG02 | 1980-199F | 0~1500rpm |
| 11 | IG02 | 19A0-19BF | 1600~3100rpm |
| 12 | IG02 | 19C0-19DF | 3200~4700rpm |
| 13 | IG02 | 19E0-19FF | 4800~6300rpm |
| 14 | IG02 | 1A00-1A1F | 6400~7900rpm |
| 15 | IG02 | 1A20-1A3F | 8000~9500rpm |
| 16 | IG02 | 1A40-1A5F | 9600~11100rpm |
| 17 | IG02 | 1A60-1A7F | 11200~12700rpm |
| 18 | IG02 | 1A80-1A9F | 12800~14300rpm |
| 19 | IG02 | 1AA0-1ABF | 14400~15900rpm |
| 20 | IG03 | 1AC0-1ADF | 0~1500rpm |
| 21 | IG03 | 1AE0-1AFF | 1600~3100rpm |
| 22 | IG03 | 1B00-1B1F | 3200~4700rpm |
| 23 | IG03 | 1B20-1B3F | 4800~6300rpm |
| 24 | IG03 | 1B40-1B5F | 6400~7900rpm |
| 25 | IG03 | 1B60-1B7F | 8000~9500rpm |
| 26 | IG03 | 1B80-1B9F | 9600~11100rpm |
| 27 | IG03 | 1BA0-1BBF | 11200~12700rpm |
| 28 | IG03 | 1BC0-1BDF | 12800~14300rpm |
| 29 | IG03 | 1BE0-1BFF | 14400~15900rpm |
| 30 | IG04 | 1C00-1C1F | 0~1500rpm |
| 31 | IG04 | 1C20-1C3F | 1600~3100rpm |
| 32 | IG04 | 1C40-1C5F | 3200~4700rpm |
| 33 | IG04 | 1C60-1C7F | 4800~6300rpm |
| 34 | IG04 | 1C80-1C9F | 6400~7900rpm |
| 35 | IG04 | 1CA0-1CBF | 8000~9500rpm |
| 36 | IG04 | 1CC0-1CDF | 9600~11100rpm |
| 37 | IG04 | 1CE0-1CFF | 11200~12700rpm |
| 38 | IG04 | 1D00-1D1F | 12800~14300rpm |
| 39 | IG04 | 1D20-1D3F | 14400~15900rpm |
| 40 | PV01 | 1D40-1D5F | 0~3100rpm |
| 41 | PV01 | 1D60-1D7F | 3200~4700rpm |
| 42 | PV01 | 1D80-1D9F | 6400~7900rpm |
| 43 | PV01 | 1DA0-1DBF | 9600~11100rpm |
| 44 | PV01 | 1DC0-1DDF | 12800~14300rpm |
| 45 | PV02 | 1DE0-1DFF | 0~3100rpm |
| 46 | PV02 | 1E00-1E1F | 3200~4700rpm |
| 47 | PV02 | 1E20-1E3F | 6400~7900rpm |
| 48 | PV02 | 1E40-1E5F | 9600~11100rpm |
| 49 | PV02 | 1E60-1E7F | 12800~14300rpm |
| 50 | PV03 | 1E80-1E9F | 0~3100rpm |
| 51 | PV03 | 1EA0-1EBF | 3200~4700rpm |
| 52 | PV03 | 1EC0-1EDF | 6400~7900rpm |
| 53 | PV03 | 1EE0-1EFF | 9600~11100rpm |
| 54 | PV03 | 1F00-1F1F | 12800~14300rpm |
| 55 | PV04 | 1F20-1F3F | 0~3100rpm |
| 56 | PV04 | 1F40-1F5F | 3200~4700rpm |
| 57 | PV04 | 1F60-1F7F | 6400~7900rpm |
| 58 | PV04 | 1F80-1F9F | 9600~11100rpm |
| 59 | PV04 | 1FA0-1FBF | 12800~14300rpm |
| 60 | CFG1 | 1FC0-1FDF | ~ |
| 61 | CFG2 | 1FE0-1FFF | ~ |
以上


コメント